바이오메디칼 분야에 특화된 생산기술 연구기반을 구축하고 중소기업을 지원함으로써 관련 분야 R&D 성과물의 상용화 촉진 및 무역수지 개선
주요 연구내용
경북 영천 내 개방형 바이오메디칼생산기술센터 구축 (센터 건립, 연구 및 기업지원 장비 도입)
최적화 설계 및 의료기기 정밀부품 제조를 위한 고분자 및 금속 성형기술 개발
의료기기 스마트 제조시스템 연구개발
주요 연구성과
전자선조사시설 및 정밀튜브 압출장비 등 바이오메디칼 분야 핵심 시설 구축을 완료하고 연구개발 및 기업지원을 통해 신산업의 성장 촉진
연구성과명
항공전자시험평가기반 구축
연구개발 배경
항공전자 전문 시험평가 센터 구축을 통해 시험 인증 Total Solution을 제공하고, 이를 통해 국내 항공전자 부품 제조기업의 시험·인증을 위한 비용과 시간을 단축하여 기술적, 경제적 경쟁력을 향상시킴
주요 연구내용
경북 영천 내 항공전자 시험평가 센터 건축 및 시험평가 장비 구축
항공전자 국제인증 및 표준화 기반 구축을 바탕으로 항공전자 장비·부품에 대한 시험평가 기반 구축을 통해 항공전자산업 육성 기반 마련
항공전자산업 발전전략 수립 및 네트워크 구축 방안 수립
주요 연구성과
항공전자시험평가를 위한 총 21종의 장비 중 온습도 챔버, 염수분무, 진동 및 열충격기 등 8종의 장비 구축
<염수 시험기>
<열 충격 시험기>
연구성과명
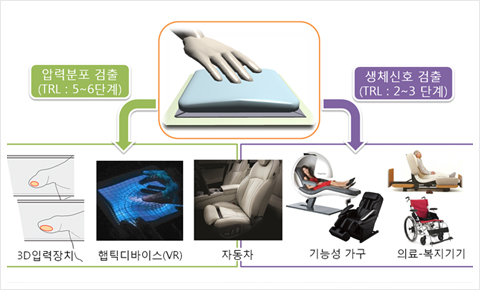
영상기반 멀티모달 촉각센서모듈 (VMATS)
연구개발 배경
IoT 및 웨어러블디바이스 분야의 확대로 인해 촉각센서를 비롯한 생체모방형 센서의 세계시장은 가파르게 성장할 것이라고 예상
특히 첨단 촉각센서 기술은 의료, 복지, 자동차, 로봇, 엔터테인먼트, VR 등 다양한 산업분야에 응용 가능
기존의 촉각센서는 물성기반의 하드웨어 의존기술이므로 품질 및 신뢰성 저하, 고비용, 응용 범위 제한이라는 문제가 있음
연구개발 최종 목표
임의의 부드러운 소재를 부드러운 힘센서, 촉각센서, 압력분포센서, Human-Machine Interface 등으로 활용하게 하는 영상기반 멀티모달 촉각센서모듈 (VMATS) 개발
주요 연구내용
VMATS를 위한 영상처리 및 3축의 힘-압력분포 추정 기술
VMATS의 박형화 및 소형화를 위한 광학 랜즈 설계 기술
VMATS를 이용한 생체신호 처리 및 해석 기술
제품 맞춤형 VMATS용 유연 소재 가공 및 패턴 인쇄 기술
제품 맞춤형 VMATS 최적 설계 기술 및 집적화 기술
주요 연구성과
관련기술개발과제 :
Tokai Rika (Toyota 계열사) 민간수탁 과제 : 인간과 기기 간의 부드러운 힘 검출을 위한 에어쿠션 역각인터페이스 (2012.4~2013.3, 총 사업비 0.1 억원)
한국생산기술연구원기관주요사업 : 에어쿠션과 카메라를 이용한 IT융합형 힘/촉각 센서 모듈 기획연구 (2014.1~2014.12, 총 0.3 억원)
로봇산업클러스터 조성사업 : 인간과 기기 간의 부드러운 물리적 상호작용을 위한 멀티모달 에어터치센서모듈 개발 (2015.5~2017.4, 총 사업비 10.8 억원)
연구개발특구 기술이전 사업화 사업 : 운전자의 안전을 위한 ICT 융복합형 멀티모달 헤드서포트 개발 (2015.5~2017.4, 총 사업비 10.7 억원)
국외학술지 : "Force Estimation via Physical Properties of Air Cushion for the Control of a Human-Cooperative Robot”, Advanced Robotics, Vol. 29, No. 2 등 관련 SCI(E)급 논문 5편
관련 특허 출원 및 등록실적 : 에어 쿠션 동작 감지 장치 및 방법 등 국내 등록 1건, 국내출원 7건, 국외출원 (미국) 1건